Z-transform
June 2, 2021
Process Data
Analyze Data
System Identification
Mathematical Foundations
Back to: Fundamentals of Signal Processing
The z-transform is defined as:
(1) 
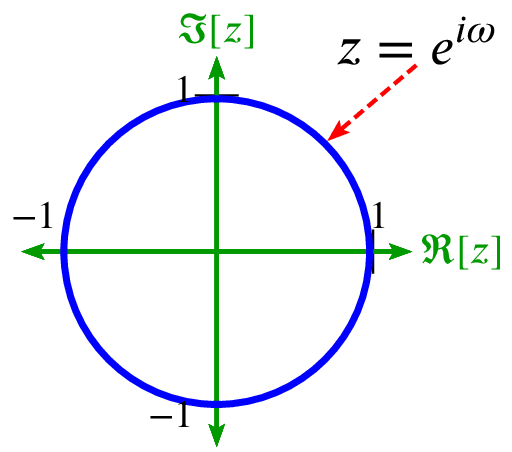
Unit Circle in Z-domain
The z-transform is a generalization of the discrete-time Fourier transform.
(2) 
Therefore, the DTFT is the unit circle portion of the z-transform.
The N-point DFT or FFT is N samples around the unit circle. The Fourier transform, which is a special case of the s-domain Laplace transform, can be roughly mapped into the z-plane by use of the bilinear transform.
(3) 
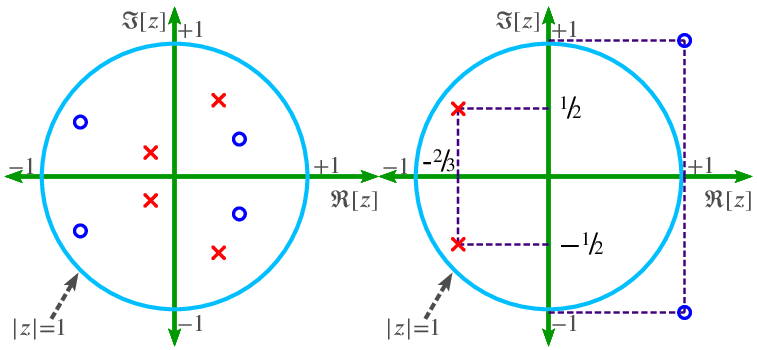
Pole-zero Locations
The roots of the numerator are called zeros, and the roots of the denominator are called poles.
(4) 
(5) 
Determine Frequency Response
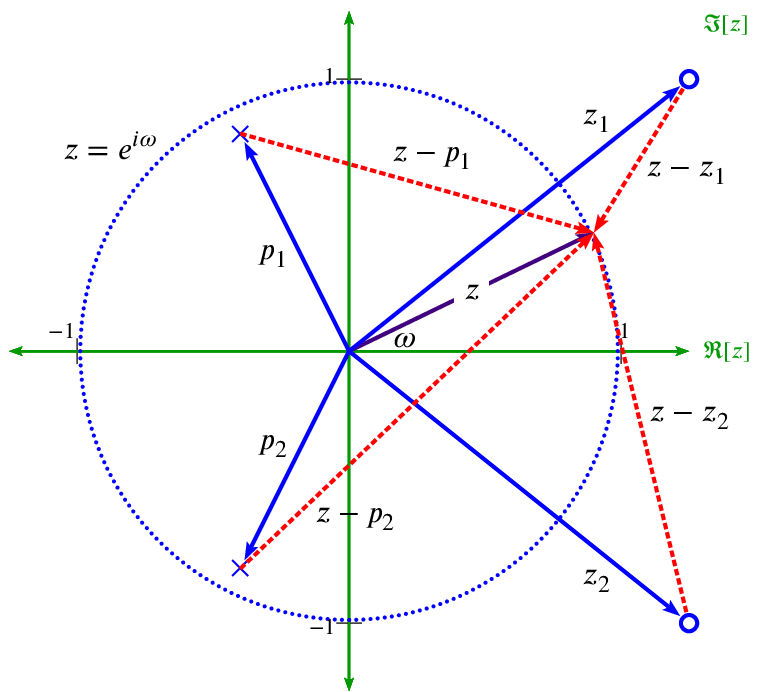
The frequency response of a filter is determined by the interaction of a unit vector rotating around the unit circle with the poles and zeros of the filter.
- The unit vector at rotation ω=0 corresponds to DC (0Hz).
- The unit vector at rotation ω=π (180°) corresponds to Fs/2 or the Nyquist frequency.
When the tip of the unit vector gets close to a zero, the filter magnitude response is pushed downwards because zero is a root of the numerator polynomial. When the tip of the unit vector gets close to a pole, the filter magnitude response is pushed upwards because a pole is a root of the denominator polynomial.
Pole-zero locations are important for:
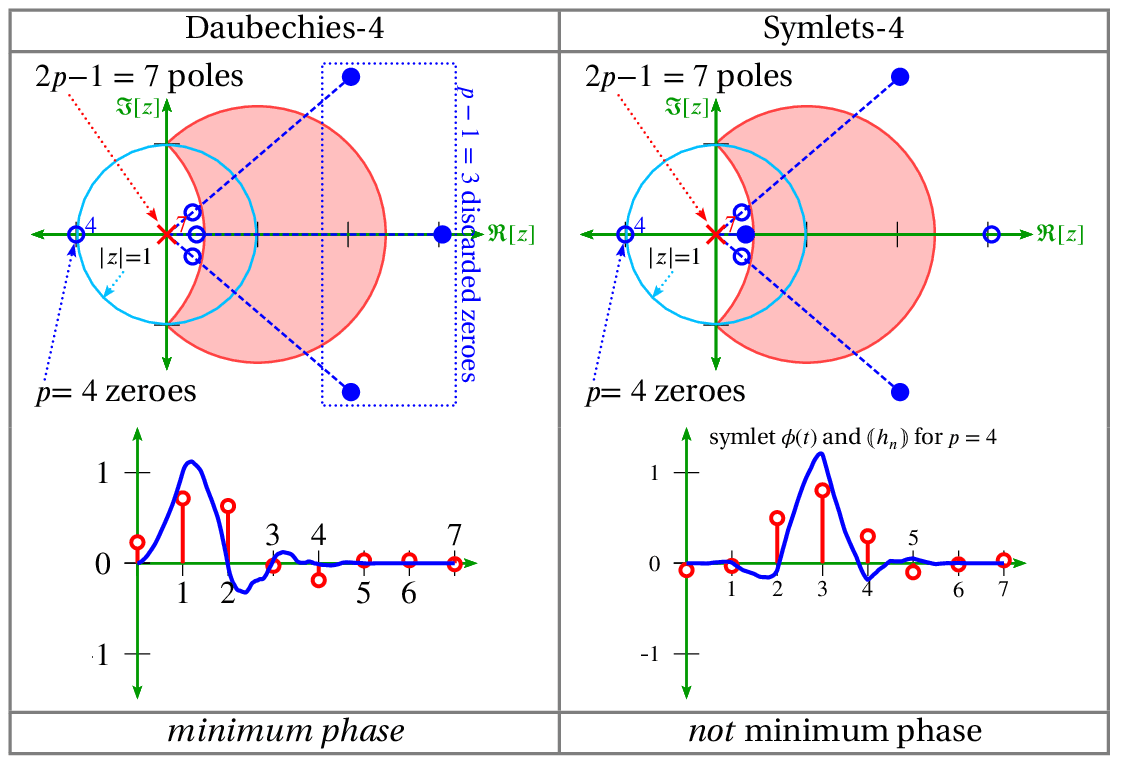
- Wavelets
- Symlets
- B-splineis