Quantization and Noise
October 23, 2019
Sampling
Frequency Domain Consequences of Sampling
Reconstruction Via Interpolation
Quantization noise and over-sampling
Differential Quantization / Delta Modulation
Noise Shaping / Delta-Sigma Modulation
Back to: Sampling & Reconstruction
Uniform 8-bit Quantization
A typical analog-to-digital converter (ADC) performs quantization 𝖰[𝗒(𝑛)] on a sample 𝗒(𝑛) as illustrated in Figure 4.1. From there, the input peak-to-peak range 𝑅 is partitioned into 23 = 8 intervals that are all of equal length 𝛥.
![Quantization 𝖰[𝗒(𝑛)] on a sample 𝗒(𝑛).](https://vru.vibrationresearch.com/wp-content/uploads/2019/10/quantization_midtread_8bit.png-1.png)
Figure 4.1. Quantization 𝖰[𝗒(𝑛)] on a sample 𝗒(𝑛).
Quantizers may be either midtread or midrise and uniform or non-uniform. In practice, midtread tends to be more popular because, unlike midrise, a small signal 𝗒(𝑛) about 0 causes no jitter in the quantization sequence 𝖰[𝗒(𝑛)]. In this course, we will focus on uniform midtread quantization.
![y(n) + v(n) = ŷ(n) delta = Q[y(n)]](https://vru.vibrationresearch.com/wp-content/uploads/2019/10/sampling_addnoise.png-1.png)
Quantization Noise Model
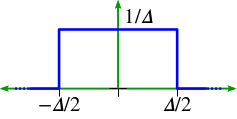
Quantization results in a distortion that is referred to as quantization noise. Quantization noise can be modeled, more or less accurately, as uniformly distributed additive white noise as described below.
Quantization is defined as additive noise 𝒗(𝑛) with these assumptions:
- 𝒗(𝑛) and 𝒗(𝑚) are uncorrelated for 𝑚 ≠ 𝑛
- Each 𝒗(𝑛) is uniformly distributed on the interval [𝛥/2 ∶ 𝛥/2).
- 𝒚(𝑛) ≜ 𝒙(𝑛𝜏) and 𝒗(𝑛) are uncorrelated.
Let 𝒗(𝑛) be quantization noise as defined above. Then, 𝖵𝖺𝗋𝒗(𝑛) = 𝛥2/12.
Proof
|
(1) |
by the definition of variance Var |
|
(2) |
by the definition of expectation E |
|
(3) |
by the definition of v(n) |
|
(4) |
by the fundamental theorem of calculus |
![\begin{equation*} \text{Var}v(n)\triangleq E[(v2-\mu)^2] \end{equation*}](https://vru.vibrationresearch.com/wp-content/ql-cache/quicklatex.com-56ed92f3b1d5c763934a6ba9eb99cb9e_l3.png "Rendered by QuickLaTeX.com")

![\begin{equation*} \triangleq\int_{x=-\Delta/2}^{x=+\Delta/2}x^2[1/\Delta]\text{d}x \end{equation*}](https://vru.vibrationresearch.com/wp-content/ql-cache/quicklatex.com-24528eceb3126badbe1a75585da964ed_l3.png "Rendered by QuickLaTeX.com")

(5) ![\begin{equation*} =1/3\Delta[(\Delta/2)^3-(-\Delta/2)^3]=1/3\Delta8[2\Delta^3]=\Delta^{2/12} \end{equation*}](https://vru.vibrationresearch.com/wp-content/ql-cache/quicklatex.com-d7a5d22c803a511d9ab509aa5a9de602_l3.png "Rendered by QuickLaTeX.com")
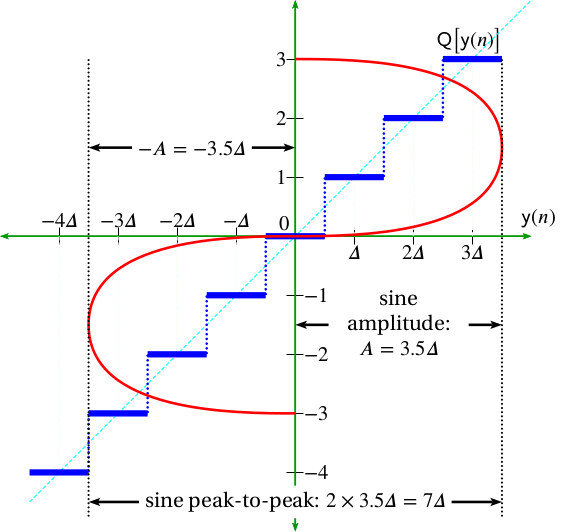
Full-scale sine quantized using a uniform midtread quantizer.