Multi-loop Control
March 29, 2022
Back to: Multi-shaker Control
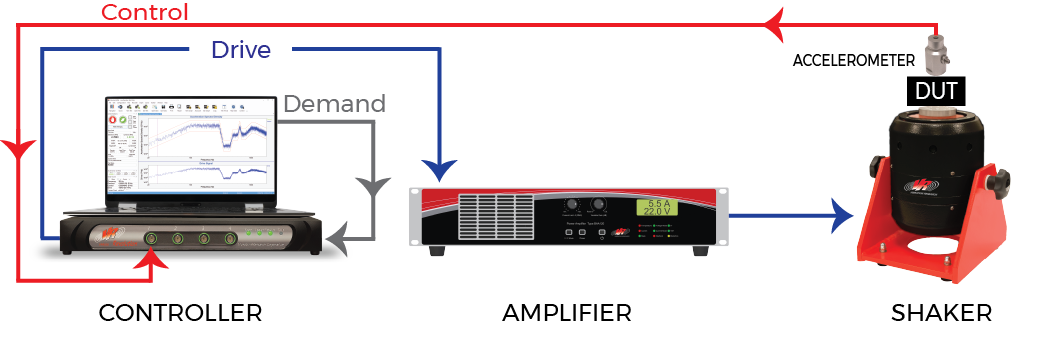
A vibration controller creates a “loop” with the shaker and device under test (DUT) by sending an analog signal to the power amplifier driving the shaker. It forms the drive signal by comparing the control acceleration measured on the shaker table or DUT with the demand reference. The control algorithms minimize the difference between the control and demand signals by adjusting the shape and amplitude of the drive signal.
This referencing of control and demand forms what is called a control loop. When the controller(s) sends independent drive signals to multiple shakers, such as in multi-axis testing, the system performs multi-loop control.
Multi-Loop Control
Multi-loop control allows for different test profiles and independent control of shakers. There are several methods for controlling simultaneous, multi-axis vibration from one or multiple controllers. As with any control method, the engineer must set reasonable control tolerances.
Matrix Control
Matrix control works with a multiple-input/multiple-output (MIMO) system. The system requires at least one accelerometer aligned with each mechanical degree of freedom (DOF). Typically, the system is over-determined, meaning there are more accelerometers than mechanical DOF. Matrix control is one of the most popular options for multi-axis control.
Matrix control receives information from the accelerometers and determines the vibration along each mechanical degree of freedom. Using the transfer function matrix and the system response, it can compute the drive necessary for control. Natural dangers may occur, but methods exist to accommodate these events (refer to MIL-STD-810G.)
When employing matrix control, the transfer function matrix should contain the terms that define how each direction of motion affects the others. An example would be a matrix that defines how excitation in the Y-axis affects the X-axis, the Y-axis (i.e., the gain along the Y-axis), and the Z-axis.
Matrix control theory is comprehensive and considers the relationship of each axis with every other axis. It defines simultaneous control of all the shakers as an inter-related set rather than independent control of each.
Extremal Control
Extremal control in multi-axis vibration testing is like extremal control in single-axis testing. The controller references the accelerometer with the maximum or minimum value.
The extremal method controls each separate control loop. Unlike matrix control, one control loop cannot account for all the axes simultaneously. Instead, a three-axis system requires one independent control loop per axis of motion.